
全国中心













 AI智能应用开发
AI智能应用开发 AI大模型开发
AI大模型开发 AI鸿蒙开发
AI鸿蒙开发 AI嵌入式+
AI嵌入式+ AI大数据开发
AI大数据开发 AI运维
AI运维 AI测试
AI测试 跨境电商运营
跨境电商运营 AI设计
AI设计 AI视频创作运营
AI视频创作运营
免费领取黑马程序员AI通道专属星级课程资料




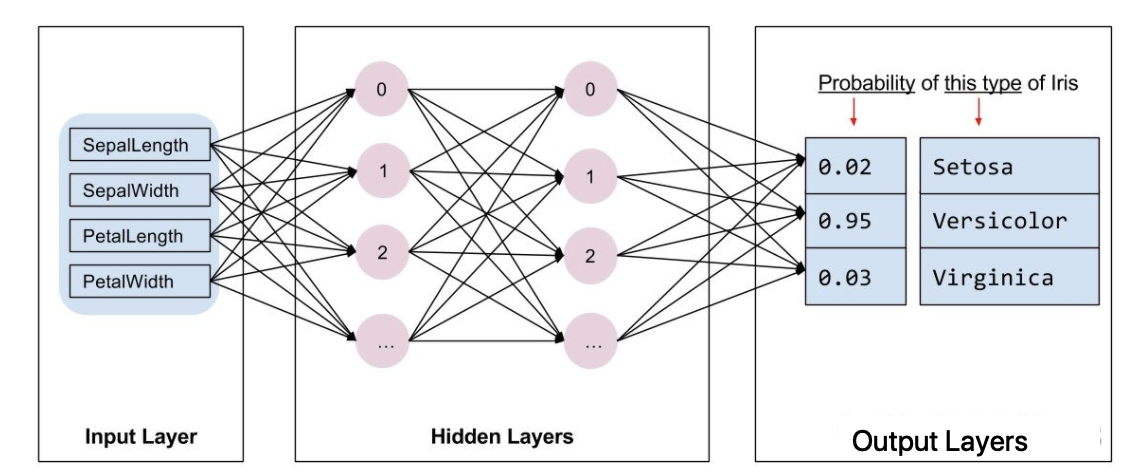
在sklearn中,模型都是现成的。tf.Keras是一个神经网络库,我们需要根据数据和标签值构建神经网络。神经网络可以发现特征与标签之间的复杂关系。神经网络是一个高度结构化的图,其中包含一个或多个隐藏层。每个隐藏层都包含一个或多个神经元。神经网络有多种类别,该程序使用的是密集型神经网络,也称为全连接神经网络:一个层中的神经元将从上一层中的每个神经元获取输入连接。查看全文>>

我们来实践一个具体的例子:热狗识别。将基于一个小数据集对在ImageNet数据集上训练好的ResNet模型进行微调。该小数据集含有数千张热狗或者其他事物的图像。我们将使用微调得到的模型来识别一张图像中是否包含热狗。查看全文>>
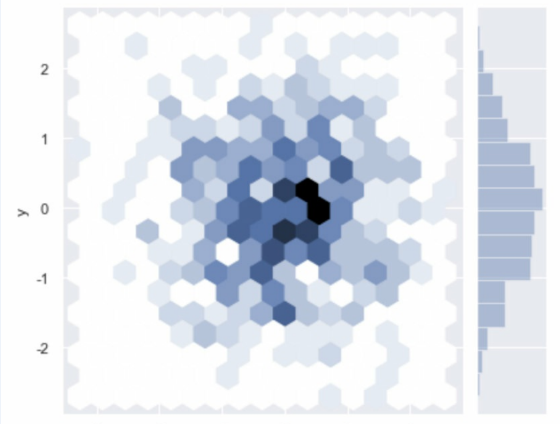
两个变量的二元分布可视化也很有用。在 Seaborn中最简单的方法是使用 jointplot()函数,该函数可以创建一个多面板图形,比如散点图、二维直方图、核密度估计等,以显示两个变量之间的双变量关系及每个变量在单坐标轴上的单变量分布。查看全文>>
在NLP领域, HMM用来解决文本序列标注问题. 如分词, 词性标注, 命名实体识别都可以看作是序列标注问题。同HMM一样, CRF一般也以文本序列数据为输入, 以该序列对应的隐含序列为输出。查看全文>>
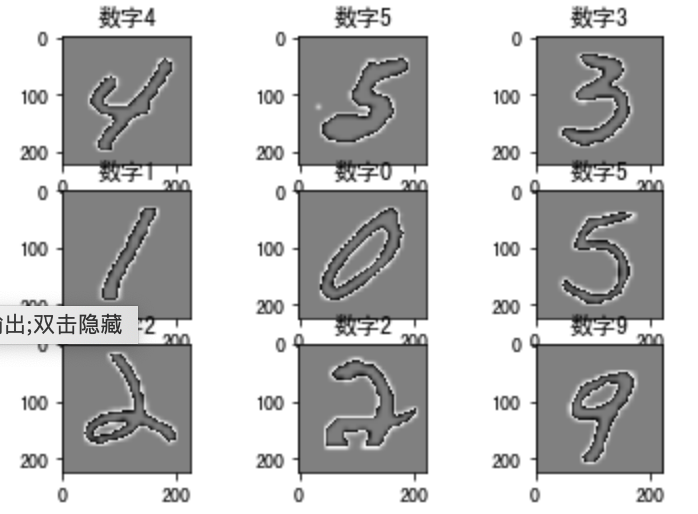
图像分类实质上就是从给定的类别集合中为图像分配对应标签的任务。也就是说我们的任务是分析一个输入图像并返回一个该图像类别的标签。假定类别集为categories = {dog, cat, panda},之后我们提供一张图片给分类模型,如下图所示:查看全文>>
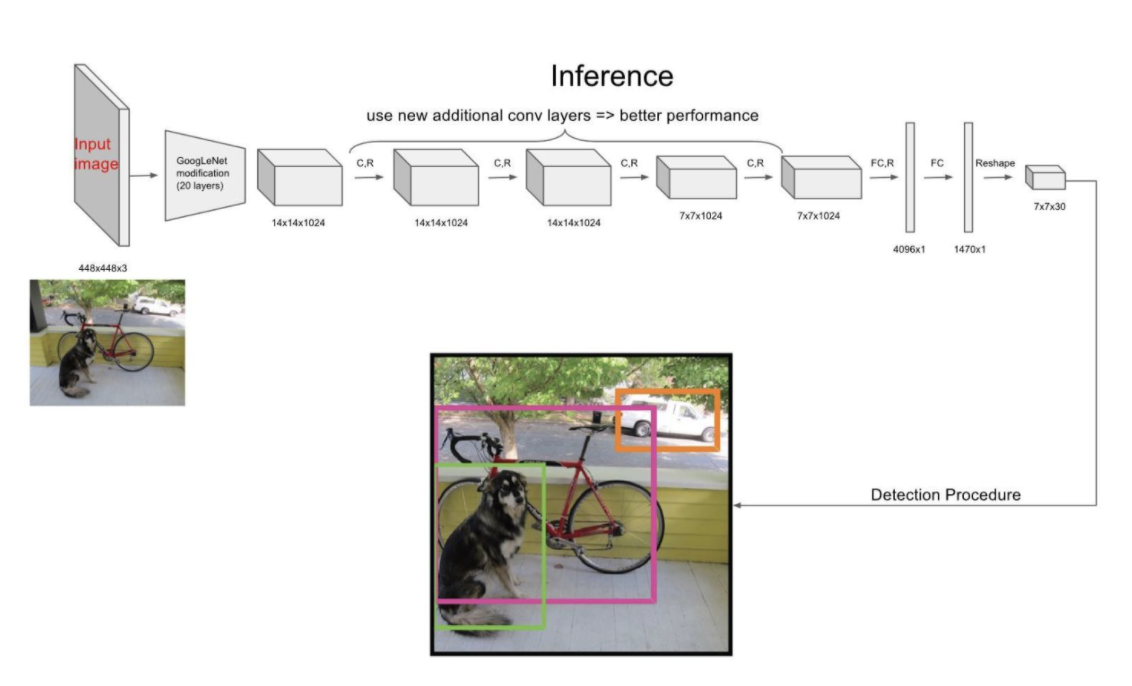
YOLO系列算法是一类典型的one-stage目标检测算法,其利用anchor box将分类与目标定位的回归问题结合起来,从而做到了高效、灵活和泛化性能好,所以在工业界也十分受欢迎,接下来我们介绍YOLO 系列算法。查看全文>>



.jpg)